Uno dei presupposti alla sintonizzazione effettuata con l'ausilio del computer è l'adozione di un modello di riferimento del sistema che si intende sintonizzare.
Infatti, ogni sensato tentativo di tuning procede per variazione di un solo parametro, se non si ha chiara la rete di interconnessione e di responsabilità dei diversi parametri, difficilmente si riuscirà a tener sotto controllo il singolo parametro.
Il Modello
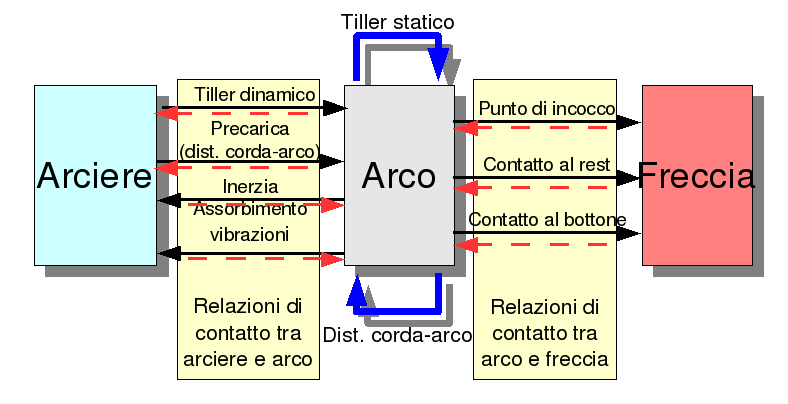 Le frecce continue nere indicano l'azione diretta, le frecce tratteggiate rosse indicano la reazione indiretta. Le frecce blu indicano una azione di tipo riflessivo o ciclico, ad indicare che azione e reazione riguardano lo stesso soggetto. Non è previsto un collegamento diretto tra arciere e freccia in quanto si tratterebbe di un errore tecnico. Si tratta di un modello generale, applicabile - con opportuni accorgimenti - anche al Compound, indipendentemente dalle tecniche e dai test di messa a punto
Le frecce continue nere indicano l'azione diretta, le frecce tratteggiate rosse indicano la reazione indiretta. Le frecce blu indicano una azione di tipo riflessivo o ciclico, ad indicare che azione e reazione riguardano lo stesso soggetto. Non è previsto un collegamento diretto tra arciere e freccia in quanto si tratterebbe di un errore tecnico. Si tratta di un modello generale, applicabile - con opportuni accorgimenti - anche al Compound, indipendentemente dalle tecniche e dai test di messa a puntoCome leggere il modello
L'arciere influisce sul comportamento dell'arco attraverso i due punti di contatto noti: l'impugnatura (grip) e la presa sulla corda. A seconda del tipo di pressione sulla grip e distribuzione della tensione sulle dita che trattengono la corda si può avere una variazione del tiller dinamico, con conseguenze sulla sincronia dei flettenti e oscillazioni della corda in senso longitudinale.
La massa dell'arco e la reazione allo scocco ritornano all'arciere la medesima informazione raccolta dai sensori propriocettivi, ciò che va sotto la classica dicitura “sensazioni del tiro”. Questo messaggio può essere più o meno mascherato dalla presenza di una stabilizzazione, soprattutto se dotata di elementi di assorbimento (TFC o “doinkers”). Stesso discorso vale sia per il modo in cui l'energia muscolare è trasferita al sistema di accumulo (corda e flettenti, nel compound occorre considerare anche gli eccentrici e i cavi) che per le influenze dirette dell'attrezzo sull'arciere (inerzia e vibrazioni).
Già da ora si comprende come la messa a punto implichi l'assemblaggio completo dell'attrezzo che si andrà ad utilizzare: la complessa relazione di interdipendenza tra le diverse parti in gioco risentirà di ogni minima modifica occorsa, vanificando in misura più o meno grave la sintonizzazione ottenuta.
Una volta sintonizzato il sistema Arciere-Arco, sarà possibile proseguire con l'accordatura del sistema Arco - Freccia. Tale sequenza è giustificata dal fatto che i parametri a disposizione (altezza del punto di incocco, posizione del centro di spinta, tensione della molla …) dipendono dalle impostazioni precedenti.
Ad esempio, l'altezza del punto di incocco dipende dal tiller dinamico risultante, sebbene un errore comune sia quello di correggere il tiller dinamico con la regolazione dell'altezza del punto di incocco. L'errore sta nel fatto che l'arco non sarà ottimizzato dal punto di vista dell'efficienza meccanica, le vibrazioni allo scocco saranno maggiori, l'arco sarà più rumoroso, il punto di incocco sarà sollecitato maggiormente e avrà la tendenza a spostarsi, potrebbero anche manifestarsi interferenze, l'asta potrebbe risultare più morbida.
La catena di responsabilità
L'adozione di un modello è soltanto il primo passo: è necessario stabilire una relazione d'ordine tra le responsabilità dei parametri, per ottenere una messa a punto consistente. Infatti, anticipare rispetto alla responsabilità la regolazione di un parametro può portare a dover rivedere la regolazione di quel parametro una seconda volta.
Ad esempio, anticipare la regolazione della posizione del centro di spinta rispetto all'altezza del punto di incocco porterà inevitabilmente a rivedere la prima. Questo è dovuto al fatto che l'altezza del punto di incocco determina l'entità del cosiddetto paradosso dell'arciere.
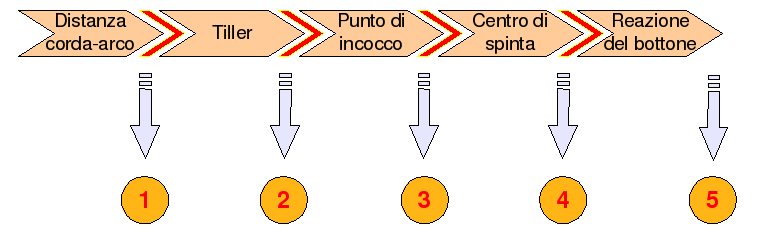 Dalla figura si noti come al termine di ogni stadio di regolazione sia prevista la valutazione o test. Resta sottinteso che prima di procedere alla sintonizzazione occorre preimpostare i parametri ad un valore di default noto da cui partire.
Dalla figura si noti come al termine di ogni stadio di regolazione sia prevista la valutazione o test. Resta sottinteso che prima di procedere alla sintonizzazione occorre preimpostare i parametri ad un valore di default noto da cui partire.Nei prossimi articoli si descriveranno: una tipica sessione di sintonizzazione e l'elenco dettagliato dei test e delle prove compatibili con il modello adottato e la corrispondente catena di responsabilità.

